Scope of this tutorial¶
This tutorial will teach you how to include and simulate two brain-controlled robots. You will implement two basic behaviors; namely, color recognition and obstacle avoidance.
Launch the Platform.
Learn how to connect brains and bodies: live edits in Brain and Transfer Function Editor
Do it yourself: design the control of a 3rd robot in the scene
Get started¶
This tutorial is actually documented in an iPython Notebook script. Let us first get it running.
Be sure to have an up-to-date Platform
cd $HBP/user-scripts
./update_nrp update all
Open the notebook multi_robots_tutorial.ipynb¶
Go to your experiment folder and run the script
cd $HBP/Experiments/multiple_robots_tutorial
ipython notebook multiple_robots_tutorial.ipynb
If you miss ipython notebook, install it
sudo apt-get install ipython-notebook
You should have now a new browser window with the following view
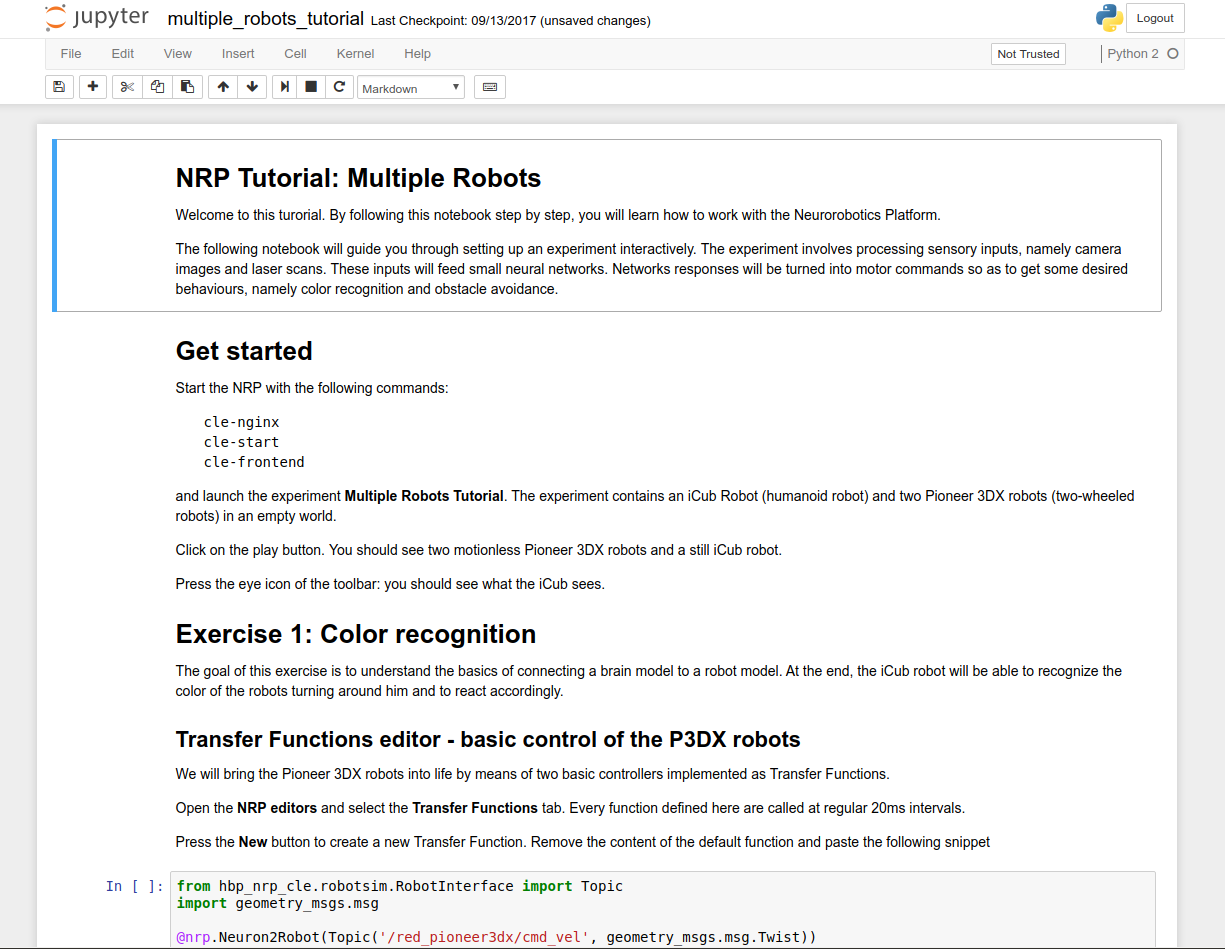
The tutorial continues in this window. Have fun!