Simulation states¶
One of the main artifacts of the CLE is the Closed Loop Controller (CLC) that controls the complete lifecycle of a simulation. In particular, CLC provides a very easy interface how to start, stop and reset a simulation. To access these features also remotely, the CLE provides some additional classes that make the functionality of the CLC available through ROS. These adapters use a state machine to interact with the CLE. Furthermore, the CLE also contains a factory to spawn these simulation servers. However, this may be refactored since there is no point having two simulation servers in the same address space.
The simulation server is implemented in the class hbp_nrp_cleserver.server.ROSCLEServer
and the simulation factory is implemented as hbp_nrp_cle.cleserver.ROSCLESimulationFactory.
State machine of the Closed Loop Controller¶
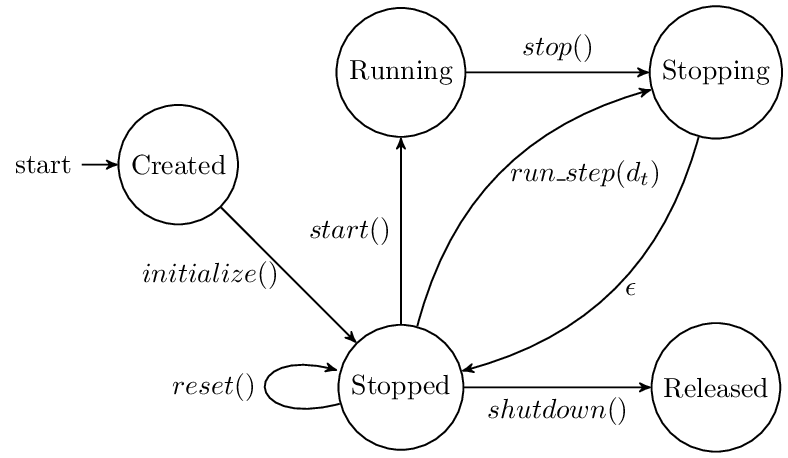
The state machine of our current implementation of the CLC, the hbp_nrp_cle.cle.ClosedLoopEngine,
is depicted in cle-state-machine.
When the CLC is created, no operation is allowed until the CLC has not been initialized. However, this is not enforced by the implementation, currently.
After the initialization, the CLC is ready to receive commands but no simulation is yet running. A running simulation can either be triggered by running the simulation for a fixed timestep using run_step() or by starting the CLC using the start() method. Beware that start() is a blocking call. Eventually, we can stop the simulation using stop(). This method returns immediately as it simply sets a stop flag. Thus, the CLC is in a state where it is about to stop after the next simulated step. Similarly, run_step sets the CLC in a state where the current step is simulated and the CLC stops after this request. When the simulation is in a stopped state, it may be reset using reset() or shut down using shutdown(). These transitions are also allowed when the CLC is in running or stopping state. In these cases, the CLC first goes to the stopped state.
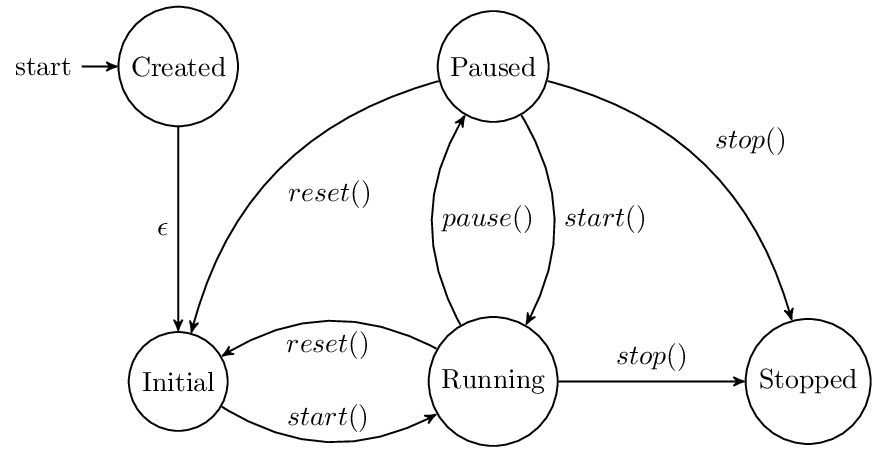
ROS CLE Server¶
The state machine of the CLE is exposed via ROS through the ROS CLE server. This server basically
exposes the exact same state machine as depicted in cle-state-machine except that currently
run_step is not allowed directly and start() returns immediately. Furthermore, there’s an
additional state Paused which allows transition start() back to state Running (inside the CLE
Paused is handled as Stopped). The transition shutdown() is not exposed, instead it’s called
stop() and allowed from Running and Paused. The CLE Server is implemented in the package
CLE Server.
ROS Simulation Factory¶
The ROS Simulation Factory is a factory ROS node that spawns ROS server instances and equips them with a CLC. This CLC is generated from an experiment description generating code for the transfer functions that are described using the BIBI Configuration File Format. The ROS Simulation Factory is implemented in the package CLE Server.