Create an experiment¶
The My Experiments tab lets you create an experiment by selecting models for the environment, the robot and the brain.
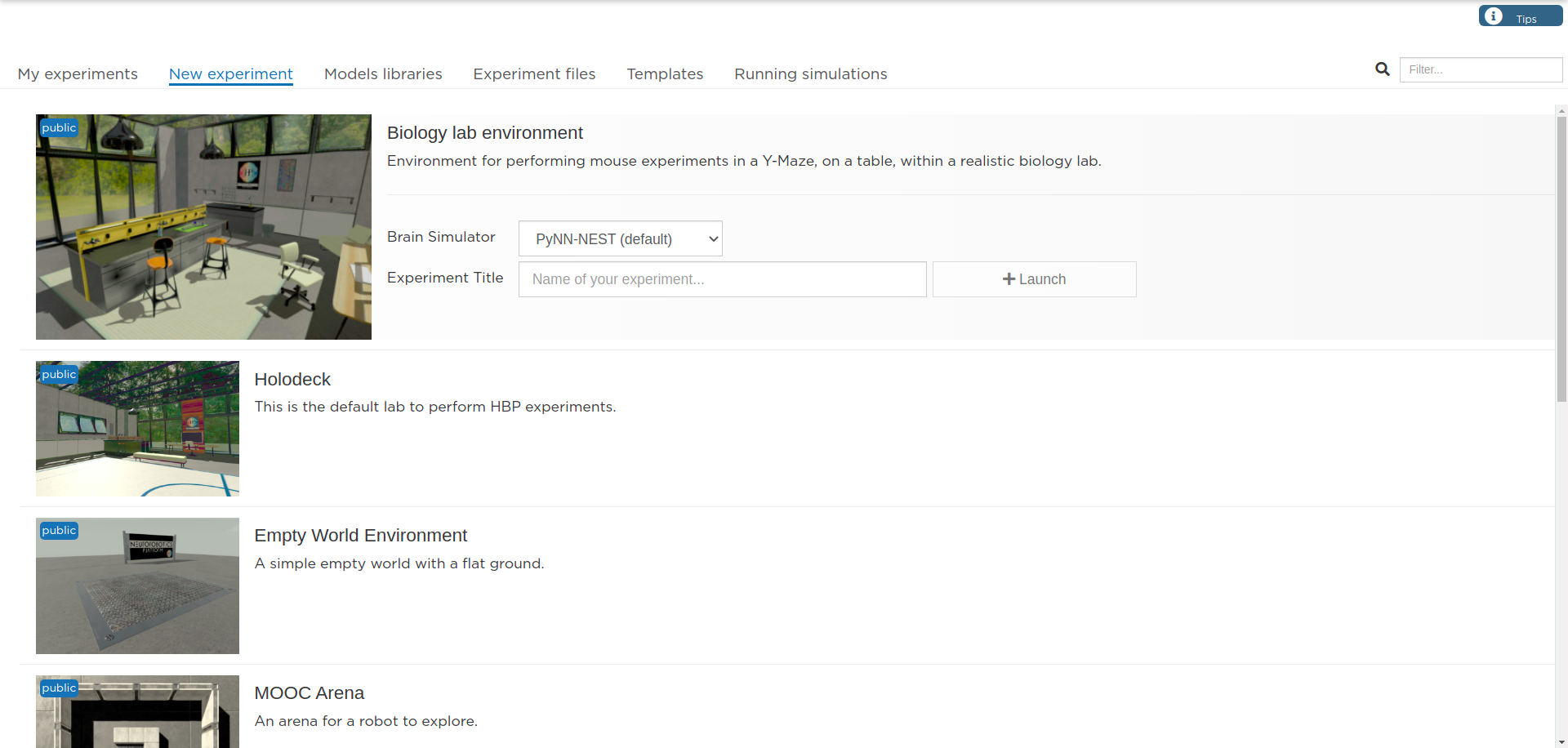
A model can be selected from the template model library provided with the NRP, from your private storage or from a file stored on your computer.
In order to select a model located on your computer, it should be first added to your private library inside your storage space (via Models libraries tab). For environment and robot models, you can select a zip file from your computer. This zip file must be a zipped folder containing a file named model.config at its root. The format of this file is described in the example below.
<?xml version='1.0'?>
<model xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xmlns="http://schemas.humanbrainproject.eu/SP10/2017/robot_model_config"
xsi:schemaLocation="http://schemas.humanbrainproject.eu/SP10/2017/robot_model_config
../robot_model_configuration.xsd">
<name>HBP Clearpath Robotics Husky A200</name>
<version>1.0</version>
<license>GPL</license>
<sdf version="1.5">model.sdf</sdf>
<thumbnail>thumbnail.png</thumbnail>
<author>
<name>J. Camilo Vasquez Tieck</name>
<email>tieck@fzi.de</email>
<name>Ryan Gariepy</name>
<email>rgariepy@clearpathrobotics.com</email>
<name>Oliver Zweigle</name>
<email>zweigle@fzi</email>
</author>
<description>
Model of a husky unmanned ground vehicle robot.
More information: https://www.clearpathrobotics.com/husky-unmanned-ground-vehicle-robot/
</description>
<website>https://www.clearpathrobotics.com/husky-unmanned-ground-vehicle-robot/</website>
<documentation>
<sensors>
<sensor name="back_left_sensor" type="force_torque" />
<sensor name="back_right_sensor" type="force_torque" />
<sensor name="front_left_sensor" type="force_torque" />
<sensor name="front_right_sensor" type="force_torque" />
<sensor name="camera" type="camera" />
</sensors>
<actuators>
<actuator name="back_left_joint" type="motor" />
<actuator name="back_right_joint" type="motor" />
<actuator name="front_left_joint" type="motor" />
<actuator name="front_right_joint" type="motor" />
</actuators>
<publication title="Semi-Supervised Spiking Neural Network for One-Shot Object Appearance Learning"
authors="J. Kaiser, R. Stal, A. Subramoney, A. Roennau, R. Dillmann"
url="https://link.springer.com/chapter/10.1007%2F978-3-662-54712-0_10"/>
<youtube title="Tutorial - Overview of the HBP Neurorobotics Platform" youtube-id="uAXzS7SPFG4"/>
<picture title="Home page" url=
"https://developer.humanbrainproject.eu/docs/projects/HBP%20Neurorobotics%20Platform/0.9/_images/gz3d-interact.png"/>
</documentation>
</model>
The content of model.config will be used to generate the online robot documentation, see Inspect a robot
When your choice of assembly is made, you can instantiate the experiment in your private storage by pressing the Clone button. The new experiment is now available in My Experiments tab.