Transfer Functions with PyTF¶
Abstraction is about concentrating on the essential parts of a system. To explain what we see as essential in the connection between a robot and a spiking neuronal network, we begin with the explanation of the domain-specific language (DSL) that captures these essential parts.
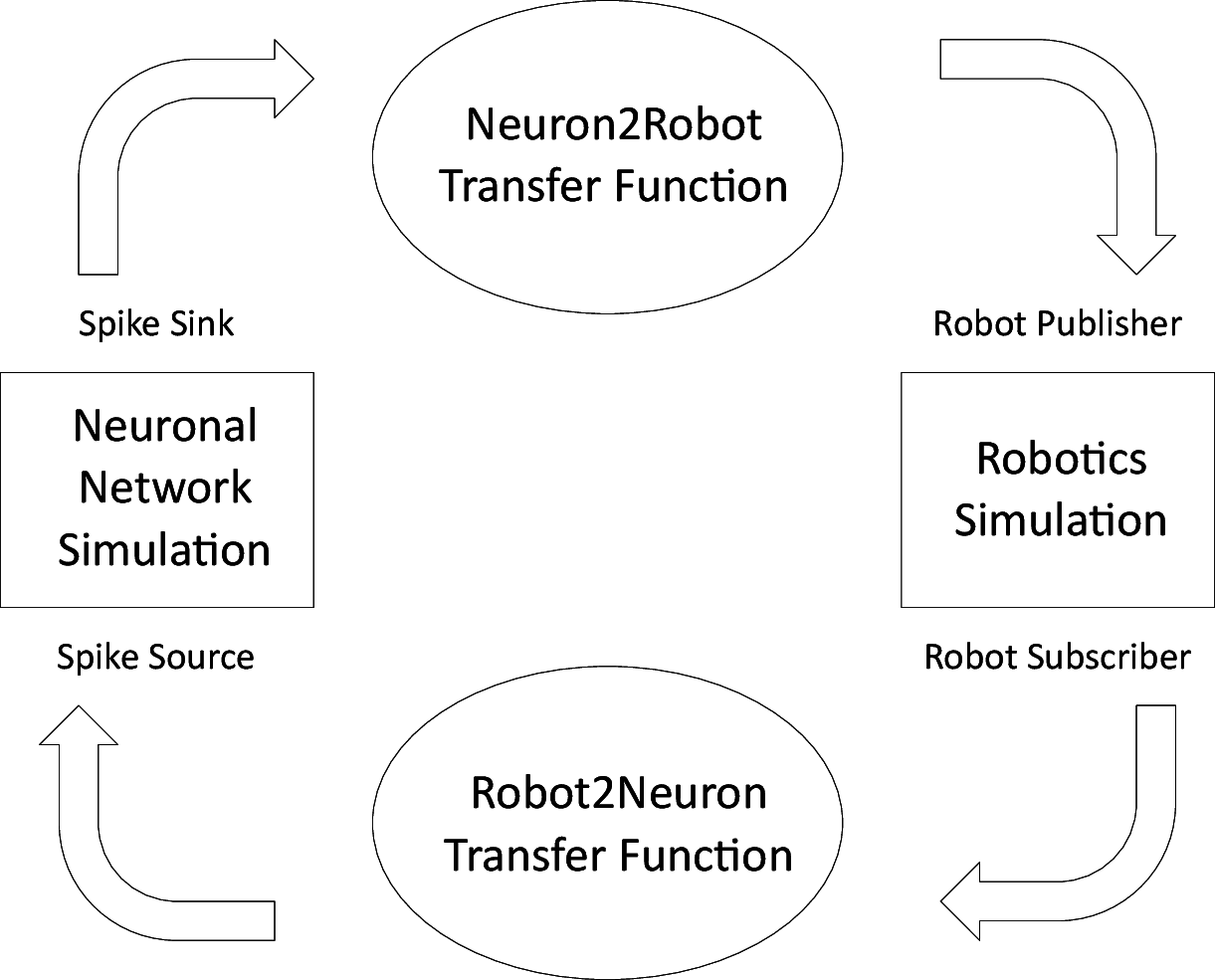
Fig. 15 A Closed Loop between Neuronal Networks and Robots¶
Our main way of connecting spiking neuronal networks with robots are transfer functions which you can see in Fig. 15. Transfer functions consist of connections between the simulators and some code which details how the data of one simulator should be transmitted to the other. The code is mainly trivial as the purpose of most transfer functions is limited to transmission, simple arithmetic adjustments and multiplexing the data from different parts of the simulators. The role of the simulators is to some extent interchangeable, in that they take information from other simulators and output information into other simulators, but the way how this is implemented differs for spiking neuronal networks and robots.
Abstract Syntax¶
The basic idea behind PyTF is that the specification of a transfer function (that is how the input from a transfer function is converted to a robot control signal) can be written as a regular Python function. The role of PyTF is to wrap Python functions into transfer functions, map their parameters to parts of either a neuronal network or a robot simulation and manage the execution of this function.
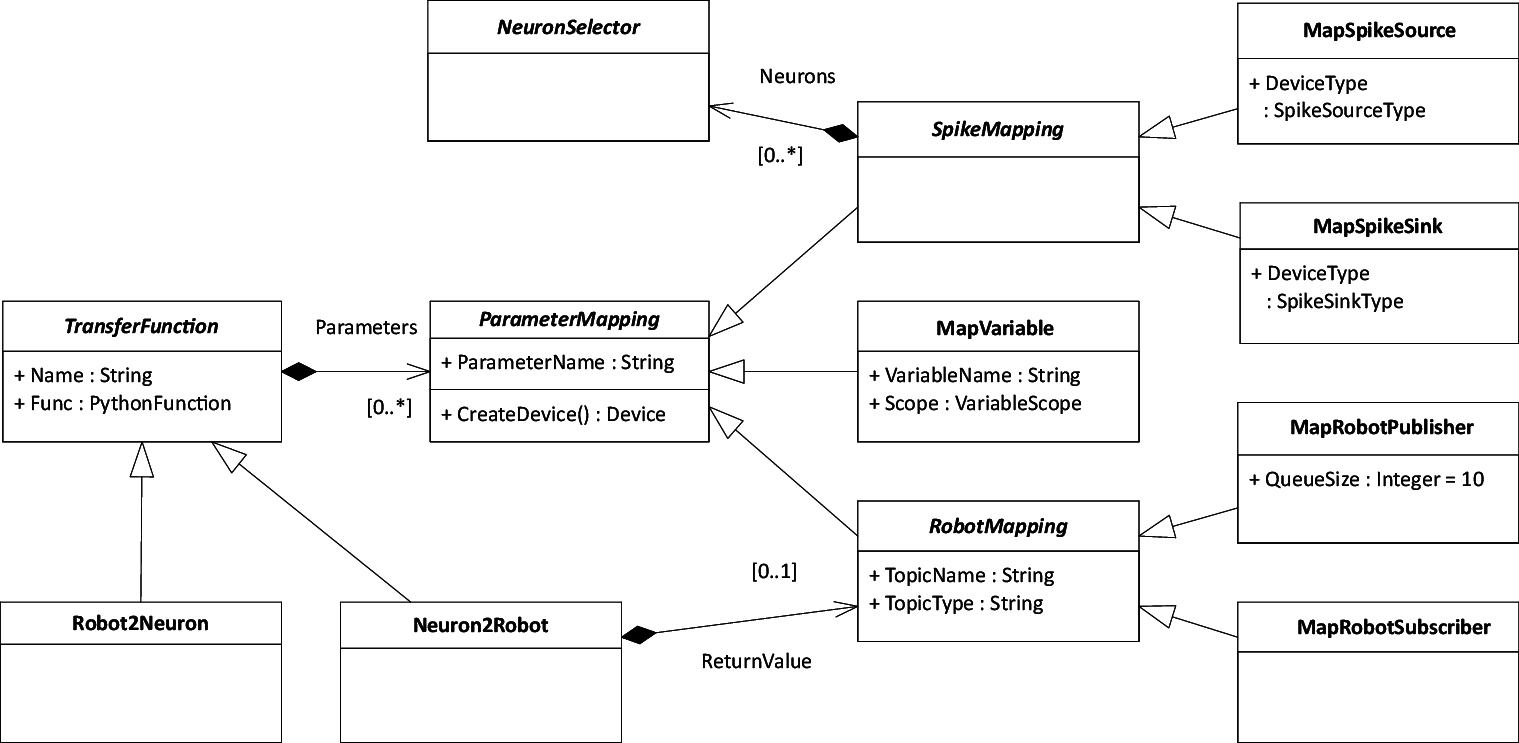
Fig. 16 The abstract syntax of PyTF¶
The abstract syntax of PyTF to achieve this functionality is depicted in
Fig. 16. A transfer function consists of an
underlying Python function and parameter mapping specifications.
Multiple types of parameter mappings exist in order to connect to either
a neuronal simulation or a robotics simulation. In principle, we
differentiate between mappings to the neuronal network
(SpikeMapping), to the robotics simulation (RobotMapping) and to
internal variables. The mapping specifications for the simulators each
have subclasses to specify whether the parameter is an input or an output
to/from the simulation.
As the parameter mapping specifications are contained in the transfer functions, a transfer function does not have external references. In particular, the deployment of transfer functions could be distributed to multiple nodes which is useful if the transfer functions contain some computational expensive logic.
All parameter mappings share an attribute specifying which parameter they belong to and a method to create a device from the mapping specification. This creates an adapter component instance in the case of a mapping to a simulation or just yields a reference to a local or global variable. For this, a reference to the surrounding TF Manager is passed into the mapping specification that contains references to the communication adapters for both neuronal and robotics simulation. The mapping specifications can then create the device independently of the concrete simulator used at either side.
PyTF has two subtypes of transfer functions, Robot2Neuron and
Neuron2Robot, represented by the upper and lower transfer functions
in Fig. 15. The rationale behind this decision is
simply to order transfer functions in the unlikely case that a control
topic is both read from and written to. Thus, Robot2Neuron transfer
functions are executed first. On the other hand, Neuron2Robot
transfer functions often result in sending a message to a particular
robot control topic. For this rather common case, the class contains a
reference to a publisher so that the transfer function may simply use
the return value of the function to publish on this topic. Other than
that, the type of transfer functions has no implications on the allowed
parameter mappings. In particular, a Robot2Neuron transfer function
may for example also contain a publisher or a spike sink.
Neuron Access Patterns¶
Whereas robot control signals or sensory inputs from the robot can be bundled in arbitrary data structures sent over ROS, the interface of a neuron is determined through its underlying neuron model. In many cases this interface is limited to a few parameters such as the membrane potential or a history of spikes. As a consequence, a single control signal for a robot is often multiplexed to a multitude of neurons and vice versa sensory inputs such as a camera image are fed into a multitude of neurons. Therefore, transfer functions are often required to connect multiple neurons at once.
Spikes (the usual interface of a neuron in a spiking neural network) are discrete in time whereas control commands for robots usually consist of continuous data sent to the robot in short intervals. Likewise, sensory inputs from the robot that will be transmitted to the neural network need to be discretized to spikes. To perform these conversions, there are multiple approaches. This includes integration of spikes to obtain continuous data from spikes and generating a current of spikes either constantly or according to some probability distribution, most notably Poisson distributions.
In PyTF users can choose between a set of predefined access patterns. Each connection to a particular set of neurons and according to a given access pattern is realized by an object we call a device (as this terminology is also partially used in the neural simulators) where the access pattern is called the device type. Depending on whether the device is an input into the network (spike source) or an output (spike sink), different device types apply. Each device can be connected to arbitrary many neurons that can be selected by navigating through the populations of the neuronal network model.
We support the following spike source device types:
Current Generators: The current generators for direct current, alternating current or noisy current do not generate spikes but inject currents of the specified type into all of the connected neurons. These devices receive the amplitude of the generated current as inputs. Here, the noisy current generator is rather a tool to test whether the neuronal network currently simulated is robust with regard to noise rather than being a good choice to encode sensory inputs.
Poisson Generator: A Poisson generator issues spikes according to a Poisson distribution. Here, the inverse of the \(\lambda\) parameter can be set in accordance to sensory inputs. This inverse reflects the rate in which spikes are generated by this device.
Fixed Frequency Generator: A fixed frequency generator deterministically generates spikes at a given frequency. Here, the frequency is set as a parameter and can be adjusted to sensory inputs. Unlike the other spike generators, this device type is not directly implemented in neuronal simulators but can be implemented by connecting a current generator with an integrate-and-fire neuron.
This selection is based on the observation that neural simulators (in particular Nest) let simulated neurons communicate through the delivery of spikes and currents. Based on the experiments we have performed so far using the platform, we believe that this list is sufficient for most applications. However, we plan to support new device types should they be demanded by users of the NRP.
The following spike sinks are supported:
Leaky Integrators: The concept of leaky integrators is to simply integrate spikes coming from a neuron under observation and add a leak term to it. The rationale behind this is that in spiking neuronal networks, the membrane potential is highly fragile. Shortly after a spike has been issued, the membrane potential is reset and therefore, it has a high importance whether any measurement is taken before or after a neuron spikes. Therefore, we augment the neuronal network with an additional leaky integrate-and-fire neuron with an infinite threshold potential (so that it never spikes) and measure the membrane potential of this neuron. The result is much less fragile and therefore appropriate to be used for robot control signals.
Population Rate: Another very common pattern is to simply take the average incoming spike rate of a neuron or a range of neurons. This is again relatively stable and can be used for translation into robot control signals.
Spike Recorder: The simplest thing a spike sink can do is to simply record all spikes issued to a neuron under observation. However, this has two major drawbacks. At first, the communication overhead is increased since all spikes are transmitted between the neuronal simulation and the transfer function but more importantly the transfer function has to make sense of this series of spikes. This allows great flexibility as this approach is extensible, but it is not suited for general use.
Again, this list contains the device types that we think are suitable for a range of applications and we do not claim that this list is sufficient for all experiments. This list is subject to change. Rarely used device types may be removed whereas device types frequently asked for may be added.
The implementation on how exactly a given device type is created is up to the communication adapter that will create the appropriate communication objects. For example, the leaky integrator device can be implemented in Nest by simply inserting a new integrate-and-fire neuron with adequately set parameters and an infinite spiking threshold so that the result is directly available as the membrane potential of the additionally inserted neuron. This is possible since the Nest simulator runs in main memory and therefore allows different modes of communication. Other simulators such as SpiNNaker are only based on spike-based communication. Here, the implementation of the leaky integrator would be to record the spikes and to do the integration manually.
Each of these device types have their own additional configuration such
as weights and delays in which the spikes are issued to spike generators
or from existing neurons into leaky integrators. On the other hand, all
devices share the connection specification towards the neuronal
simulator, that we call NeuronSelector (cf. Fig. 16).
This is a function that given a model of the neuronal network selects the
neuron a device should be connected to. This includes entire populations but
also views and assemblies.
While a single device is sufficient to transmit simple sensory data to the network or issue command control signals to the robot, the transmission of complex sensory inputs such as camera images requires multiple devices connected to different neurons each. This is the reason that a device mapping can specify not only a single but multiple neuron selectors. In the case that multiple neuron selectors are present, the framework won’t create just a single device but one for each neuron selector.
The advantage of these device groups is that they aggregate the values from individual devices to arrays, making this a suitable choice when the data in the robotics simulator is available as an array. This is the case for camera inputs that can then transmitted to an array of Poisson generators. Furthermore, device groups can be configured comfortably as in these scenarios devices usually share large proportions of their configuration.
Mapping to Python¶
Applying a typical query-and-command programming interface for managing transfer functions would presumably result in verbose schematic code. Thus, we use techniques from the area of domain-specific languages to raise the abstraction level of the target platform by means of an internal DSL, PyTF. With PyTF, we obtain a more concise representation of transfer functions. Users can specify transfer functions as regular Python functions decorated with their connections to neuronal and world simulators. The coordination regarding data synchronization and simulation orchestration is hidden in the platform abstractions.
We chose an internal DSL and Python as a host language because Python is popular both among robotics and neuroscience users. Given the research results from Meyerovich that suggest that developers do not like to change their primary language, we wanted to make the barrier for neuroscientists as low as possible. There is a Python API for both the neuronal simulations and the robotics side. Large parts of the framework are implemented in Python and this allows an easy implementation of the DSL as a Python API.
To implement transfer functions in PyTF, we have decided on using the Python decorator syntax. A first set of decorators turn a regular Python function into a transfer function and a second set specifies parameter mappings. Everything else, including the neuron access patterns and device types is specified as parameters for these decorators.
A consequence of this design is the name of the classes in the abstract syntax. They are named to be as understandable as possible.
In particular, the classes Neuron2Robot and Robot2Neuron create
a new transfer function object with no reference to any regular Python
function. When used as a decorator and applied to a Python function, the
underlying Python function of the transfer function is set and
placeholders for the parameter mappings are created (Python allows to
retrieve the parameter names of a method using the inspect module).
The mapping specification classes MapSpikeSource, MapSpikeSink,
MapVariable, MapRobotPublisher and MapRobotSubscriber then
create a parameter mapping specification object that when called with a
transfer function replaces the according placeholder with themselves and
returns the transfer function to allow other parameters to be mapped. If
no appropriate placeholder exists, an error message is thrown.
The configuration for mapping specifications is passed as arguments to the decorator representing the parameter mapping. Here, the device mappings are interesting as they allow the most detailed configuration. In particular, they contain a specification to which neurons a device should be connected as a function selecting the neurons for a given model of the neuronal network. However, as we do not want our users to bother with the details of lambda functions, we created a small API to allow them to write such functions as if they were operating on an assumed neuronal network model directly.
To specify multiple neuron selectors, a list of neuron selectors must be passed into the neuronal network constructor. In PyTF, we support a mapping operator that construct such lists of neuron selectors based on a lambda function and a concatenation operator to express more complex patterns. These operators make use of the knowledge that neuron selectors must not be nested deeper than in one list (i.e. it is not permitted to specify a list of a list of neuron selectors for a device) and flatten these lists when required.